ę²čį
▐Dūė▓╗ī”ųą╩ŪųĖė╔ė┌ÖCąĄĄ─ųŲįņĪó░▓čbš`▓ŅĪóÖCĮM│┴ĮĄ▓╗Š∙╝░╩▄▌d╗“£žČ╚ūā╗»║¾Ą─Ė„ĘNūāą╬Ż¼╩╣ÖCŲ„į┌╣żū„ĀŅæBĢr“īäė▌SĄ─▌SŠĆ┼cÅ─äė▌SĄ─▌SŠĆ«a╔·▌SŠĆĄ─ī”ųą╬╗ęŲš`▓ŅŻ¼│ŻęŖĄ─▐Dūė▓╗ī”ųąėąŻ║ŲĮąą▓╗ī”ųąĪóĮŪČ╚▓╗ī”ųąĪóŠC║Ž▓╗ī”ųąĪŻ▐Dūė▓╗ī”ųąįņ│╔▐DūėĄ─ÅØŪ·╝░į┌▌S│ąųąĄ─ĖĮ╝ė▌d║╔Ż¼ų┬╩╣Ė„▌S│ąķgĄ─▌d║╔ųžą┬Ęų┼õŻ¼ę²ŲÖCĮMÅŖ┴ę╣▓š±ĪŻ
▒Š╬─ų„ę¬čąŠ┐ŲĮąą▓╗ī”ųąŻ¼└¹ė├╠ōöMĘ┬šµ╝╝ągŻ¼═©▀^ŪČ╚ļHertzĮėė|└ĒšōĮ©┴ó’LÖCŽĄĮyĄ─╠ōöMśėÖC─Żą═Ż¼×ķ╗∙ė┌╠ōöMśėÖCĄ─ą²▐DÖCąĄ╣╩šŽĄ─į\öÓĄ─┐╔ąąąį蹊┐╠ß╣®┴╦ę└ō■ĪŻ
1 Ę┬šµ─Żą═Ą─Į©┴ó
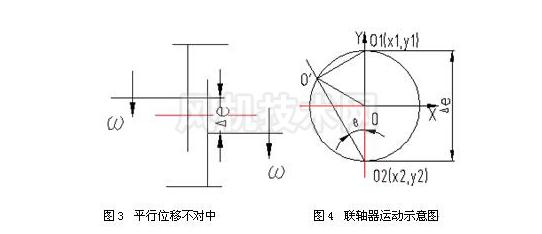
ęį─│Ų¾śIįŁ┴ŽÅS’LÖCŽĄĮy×ķ蹊┐ī”Ž¾ĪŻįō’LÖCŽĄĮyėąļŖäėÖCĪóš{╦┘ę║┴”±Ņ║ŽŲ„Īóį÷╦┘’LÖC║═╣─’LÖCĄ╚ĮM│╔Ż¼ųąķgĘųäe▓╔ė├─żŲ¼┬ō▌SŲ„║═²X╩Į┬ō▌SŲ„▀BĮė│╔ę╗š¹¾wŻ¼ŲõŽĄĮy▓╝ų├ęŖłD1.└¹ė├Pro/E▄ø╝■Į©┴óŲõģóöĄ╗»─Żą═Ż¼į┌└¹ė├Mechanism/ProĮė┐┌ī”─Żą═▀Mąąäé¾w╗»Č©┴xŻ¼╚╗║¾Ą╣╚ļADAMS▄ø╝■ųąČ©┴xĖ„äé¾wų«ķgĄ─╝s╩°Ż¼▓óī”Ę┬šµ─Żą═Ą─š²┤_ąį▀MąąÖz“ׯ¼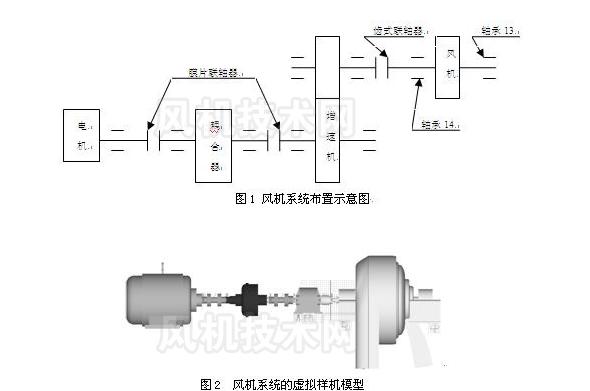
į┌ī”─Żą═ųą²X╩Į┬ō▌SŲ„Ą─╠Ä└Ē▀^│╠ųąŻ¼ā╔░ļ┬ō▌SŲ„┼c═Ō²X╠ū╩®╝ėīŹ¾wĮėė|Ż¼ąĶę¬┤¾┴┐Ą─ėŗ╦ŃĢrķgŻ¼▓óė╔ė┌ŠžĻćŲµ«ÉČ°ī¦ų┬Ū¾ĮŌ╩¦öĪŻ¼╦∙ęįī”²X▌åć¦║Žčž²XīÆĘĮŽ“Ą─Ų½▓Ņ▀Mąą┴╦║å╗»╠Ä└ĒŻ¼░ččž²XīÆĄ─├µĮėė|║å╗»×ķŠĆĮėė|Ż¼Ųõ▌å²XĄ─²X└¬ŠĆ╩Ūė├ADAMSųąĄ─śėŚlŪ·ŠĆöM║Ž╣żŠ▀╔·│╔Ą─Ż¼▓ó═©▀^ą▐Ė─Ū·ŠĆĄ─ģó┐╝³cū°ś╦Ż¼░čŪ·ŠĆŪČ╚ļĄĮīŹ¾w┴Ń╝■ųąĪŻ
2 ┬ō▌SŲ„▓╗ī”ųą╣╩šŽÖC└Ē
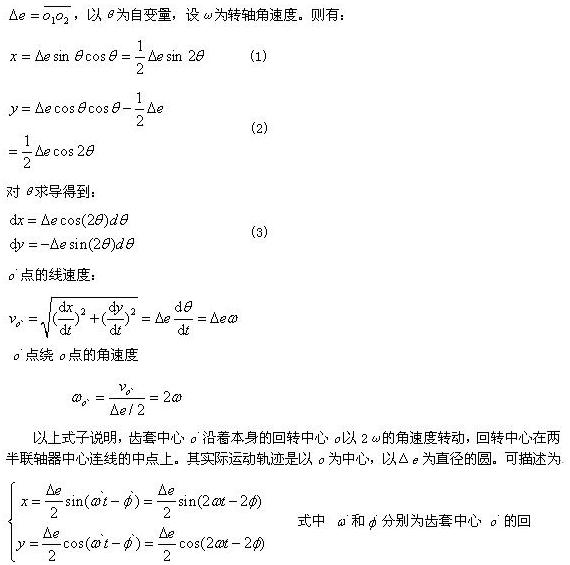
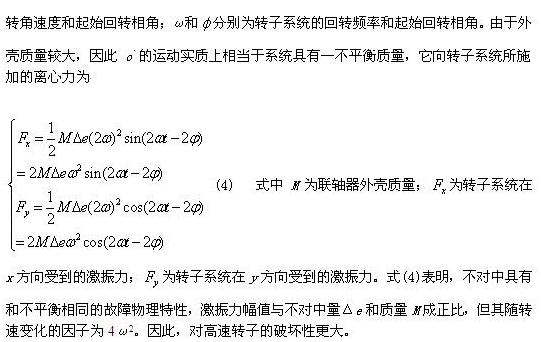
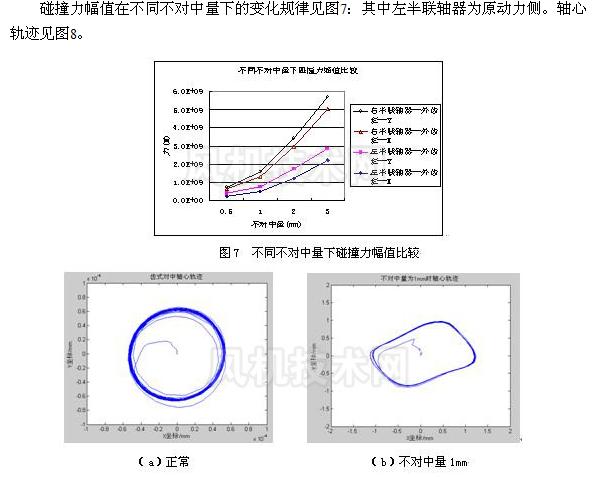
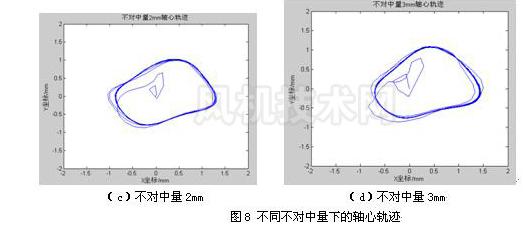
²X╩Į┬ō▌SŲ„ŲĮąą▓╗ī”ųąųŲĄ─╩Ūā╔░ļ┬ō▌SŲ„Ą─▌Są─ŠĆ▓╗į┌═¼ę╗Ślų▒ŠĆ╔ŽŻ¼Č°╩ŪŽÓ╗źŲĮąą▒Ż│ųę╗Č╬ŠÓļxŻ¼į┌ą²▐DĀŅæBŽ┬«a╔·š±äėĒææ¬Ż¼ęŖłD3.į┌░l╔·ŲĮąą▓╗ī”ųą╣╩šŽ║¾┬ō▌SŲ„Ą─īŹļH▀\äėŪķøręŖłD4.
įOO1╩Ūū¾░ļ┬ō▌SŲ„Ą─ųąą─Ż¼O2╩Ūėę░ļ┬ō▌SŲ„Ą─ųąą─Ż¼O©F╩Ū²X╠ūĄ─ųąą─Ż¼ŲĮąą▓╗ī”ųą┴┐×ķ
3 Ę┬šµĘų╬÷
3.1 Įėė|ģóöĄĄ─▀xō±
Ė∙ō■HertzĮėė|└Ēšō║═²X╩Į┬ō▌SŲ„Ą─ų„ę¬ģóöĄŻ¼ėŗ╦Ń│÷▌å²Xć¦║ŽäéČ╚k×ķ15.067e+5N/mm/3/2,ūĶ─ߎĄöĄDamping×ķ3000N.s/mm,┼÷ū▓┴”ųĖöĄ×ķ1.5Ż¼┤®═Ė╔ŅČ╚×ķ0.1.ūĶ─ߎĄöĄ×ķ0.1Ż¼ī”ė┌Øuķ_ŠĆ²X▌åŻ¼Ųõ╣żū„▀^│╠ųą²X└¬ć¦║Ž³cĄ─╬╗ų├╩Ūūā╗»Ą─Ż¼ė╔ė┌Ė„ć¦║Ž³cĄ─Ū·ŠĆ░ļÅĮļSų°╣سcć¦║Ž╠ÄĄ─Ū·┬╩░ļÅĮ╔ŽŽ┬▓©äėŻ¼ę“┤╦R╩Ūę╗éĆūā┴┐Ż¼┐╝æ]ĄĮ²X▌åĄ─²XĖ▀║═ĘųČ╚łA░ļÅĮ▒╚▌^ąĪŻ¼ūāäėĘČć·▓╗┤¾Ż¼╣╩į┌ėŗ╦ŃųąĮ³╦ŲęįĘųČ╚łA╔ŽĄ─ųĄüĒ┤·╠µĪŻ
ī”ŽĄĮy─Żą═▀Mąą0.5s,300▓ĮĄ─Ę┬šµŻ¼Ą├ĄĮŽĄĮy▓┐ĘųŽÓæ¬Ą─Ū·ŠĆĪŻ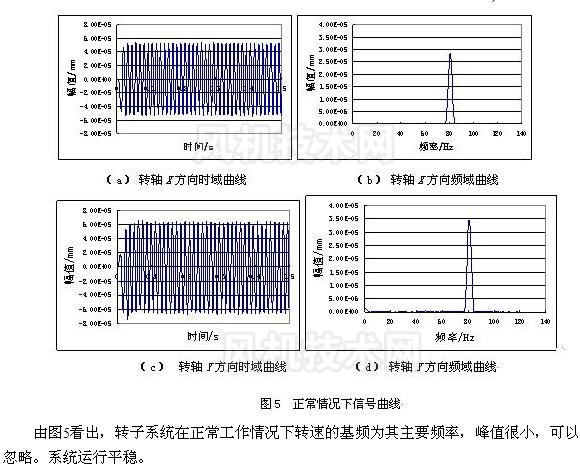
3.2 ČÓ╣żørŽ╚Ą─Ę┬šµ
įōŽĄĮy╦∙ė├┬ō▌SŲ„×ķ░ļōŽąį┬ō▌SŲ„Ż¼╦³į┌╣żū„ųą─▄ūįäėš{š¹╬ó┴┐Ą─▓╗ī”ųą┴┐Ż¼▓óŪęį┌Į©─Żųą▀MąąĄ╚ą¦▐D╗»Ż¼×ķ┴╦Ė³├„’@Ą─┐┤│÷▓╗ī”ųą╣╩šŽĄ─╠žš„Ż¼╚Ī▓╗ī”ųą┴┐Ęųäe×ķ0.5Ż¼1Ż¼2Ż¼3Ż¼▐D╦┘×ķŅ~Č©▐D╦┘4843r/min,▀Mąą0.5s,300▓ĮĘ┬šµŻ¼ęį▓╗ī”ųą┴┐3mm×ķ└²Ż¼ęŖłD6
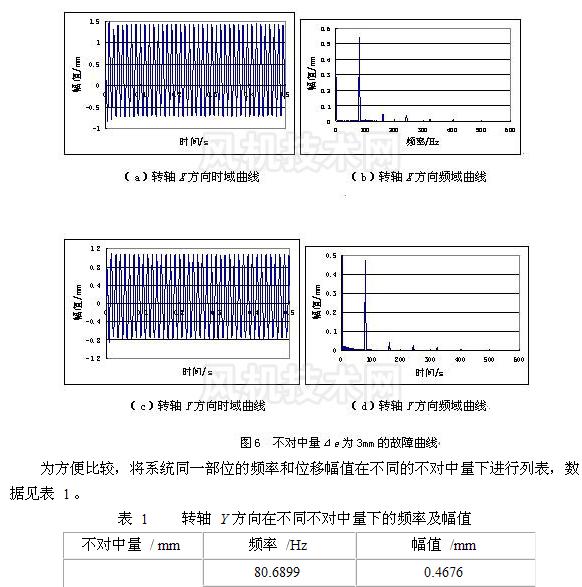
═©▀^ī”’LÖC▐DūėŽĄĮyĄ─▓╗ī”ųą╣╩šŽ▀MąąĄ─äė┴”īWĘ┬šµĘų╬÷Ż¼Ą├│÷ĮYšōŻ║
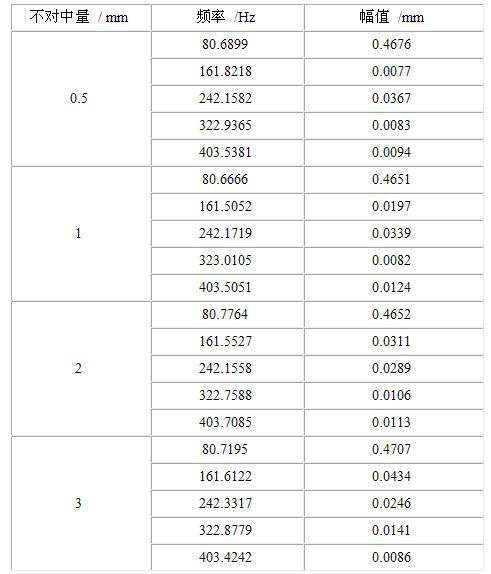
Ż©1Ż®į┌²X╩Į┬ō▌SŲ„▓╗ī”ųą╣╩šŽĄ─ŪķørŽ┬Ż¼▐DūėŽĄĮyį┌š±äėųą│²╗∙Ņl═ŌŻ¼▀Ćėą2▒ČĪó3▒╗Īó4▒ČĪó5▒ČĄ─Ūķør
Ż©2Ż®ī”ė┌2▒ČŅlĘų┴┐Ż¼ŲõĘ∙ųĄļSų°▓╗ī”ųą┴┐Ą─į÷╝ėČ°į÷┤¾
Ż©3Ż®▌Są─▄ē█EļSų°▓╗ī”ųą┴┐Ą─į÷┤¾Ż¼ųØuė╔š²│ŻĢrĄ─łAą╬▀^Č╔×ķŅÉ╦ŲŽŃĮČą╬
Ż©4Ż®²X╩Į┬ō▌SŲ„Ą─┼÷ū▓┴”Ż¼ŲõĘ∙ųĄ┼c▓╗ī”ųą┴┐│╔š²▒╚Ż¼ļSų°▓╗ī”ųą┴┐Ą─į÷╝ėŻ¼┴”Ę∙ųĄŠĆąįį÷┤¾ĪŻ
4ĮYšō
įö╝ÜĘų╬÷┴╦²X╩Į┬ō▌SŲ„Ą─▓╗ī”ųą╣╩šŽÖC└ĒŻ¼į┌┤╦╗∙ĄA╔ŽŻ¼└¹ė├╠ōöMśėÖCĄ─Ę┬šµ╝╝ągĮ©┴ó┴╦įō’LÖCĄ─śėÖC─Żą═Ż¼▀MąąČÓ╣żørŽ┬Ą─Ę┬šµĘų╬÷Ż¼╠ß╚ĪŲõ╠žš„ą┼╠¢Ż¼═©▀^Ģrė“Ą─▓©ą╬łDĪóFFTŅlūVłDŻ¼öĄō■ĪóŪ·ŠĆłD║═▌Są─▄ē█E▀MąąĘų╬÷ĪŻĄ├ĄĮ▓╗ī”ųą╣╩šŽęÄ┬╔Ż¼Ę┬šµĮY╣¹║═└ĒšōĘų╬÷▒╚▌^Ż¼ŲõĮY╣¹ŽÓ╗ź╬Ū║ŽŻ¼ūCīŹ┴╦Ę┬šµĮY╣¹Ą─š²┤_ąįĪŻ
ģó┐╝╬─½I
1 ĒnĮĪ ²X╩Į┬ō▌SŲ„┬ōĮė▐DūėŽĄĮyĄ─ī”ųą╣╩šŽÖC└Ē┼cūRäe
2 └Ņ╚²╚║Ą╚ ╗∙ė┌╠ōöMśėÖC╝╝ągĄ─²X▌å┬ō▌SŲ„äė┴”īWĘ┬šµčąŠ┐
3 ┘ZķLų╬ ╠ōöMśėÖCį┌╗┼┌čąųŲ╝░įu╣└ųąĄ─æ¬ė├蹊┐
4 Ž─╦╔▓© Åłą┬ĮŁ äóš╝╔· ą²▐DÖCąĄ▓╗ī”ųąčąŠ┐╣╩šŽŠC╩÷
| 






